
Chapitres










Exercice 1 : Le LiDAR
Les LiDAR, acronyme de « Light Detection And Ranging » sont des systèmes de mesure à distance utilisant généralement les propriétés laser. On les utilise pour la télémétrie (distance Terre-Lune par exemple), la topographie (réalisation de cartes), les mesures de concentrations de gaz ou encore pour déterminer la vitesse des vents. Données à 25°C :
| Célérité en m.s-1 | Dans l’air | Dans l’eau |
|---|---|---|
| onde sonore et ultrasonore : | 3,40 × 102 | 1,48 × 103 |
| onde électromagnétique : | 3,00 × 108 | 2,26 × 108 |
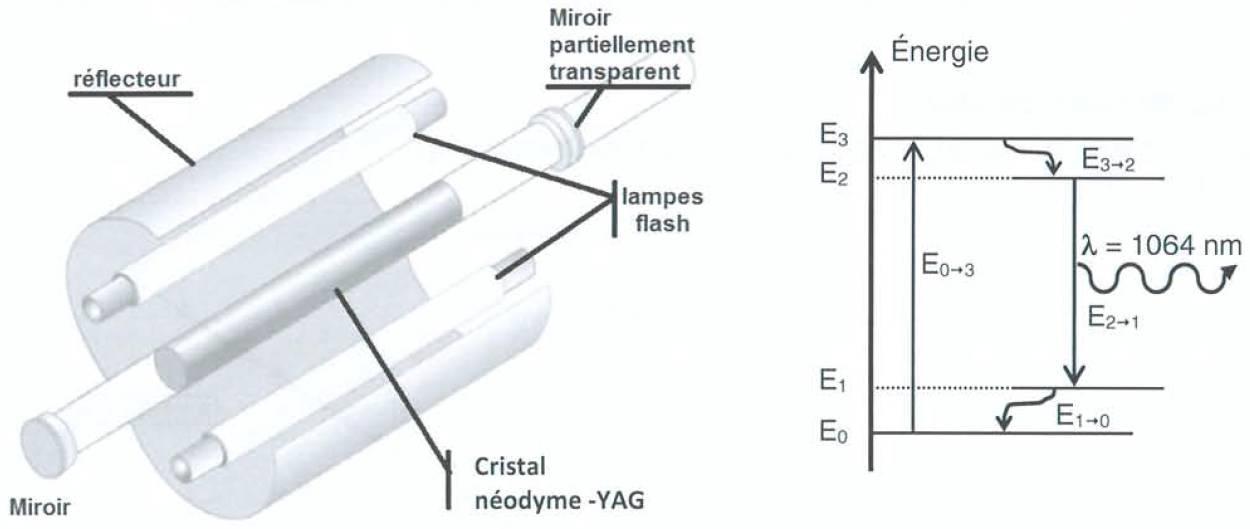
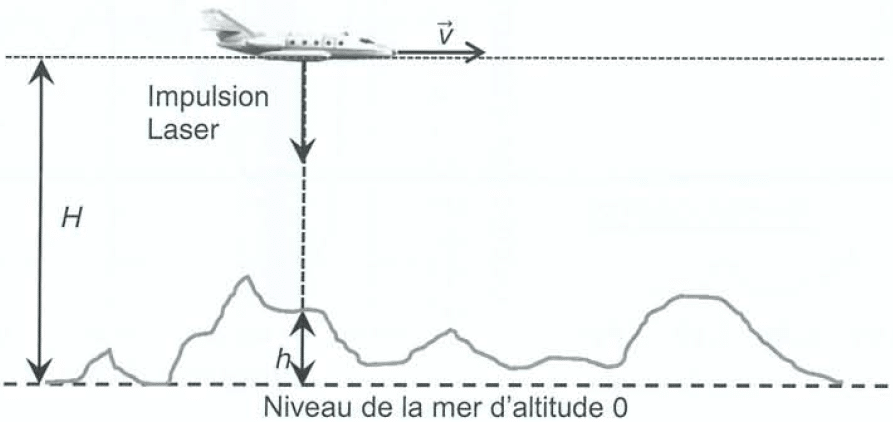
Le LiDAR topographique embarqué.

Le LiDAR bathymétrique

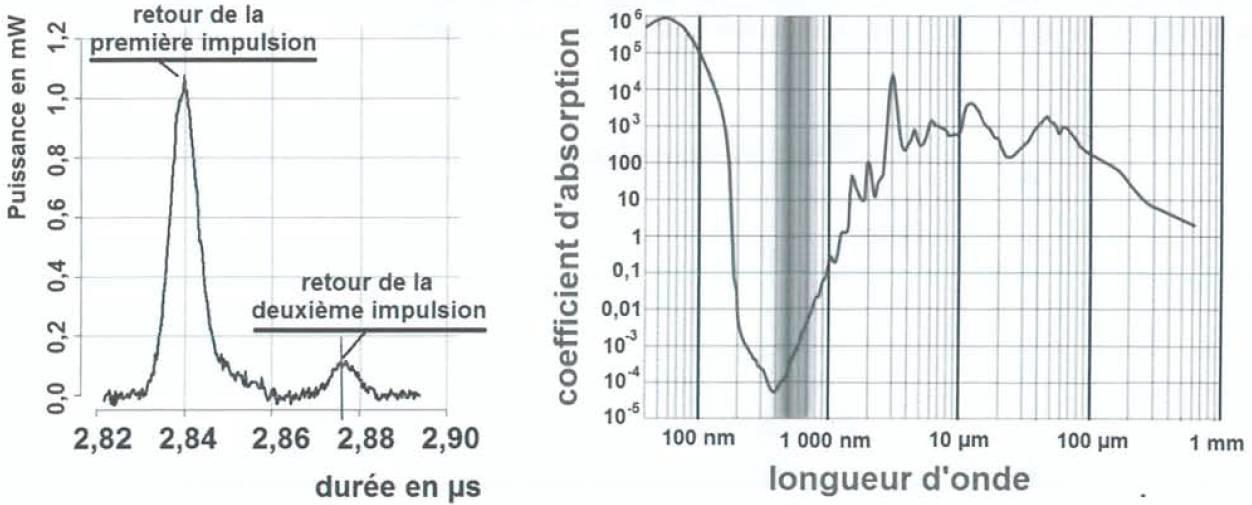
Document n°2 :puissance lumineuse reçue par le récepteur en fonction du temps. Spectre n°1 : spectre d’absorption de l’eau. La radiation est d’autant plus absorbée que le coefficient d’absorption est élevé.
Les longueurs d’onde des deux lasers sont de 532 nm et de 1064 nm. Attribuer, en justifiant, la longueur d’onde à chacun des deux lasers du LiDAR bathymétrique. Expliquer pourquoi il est plus judicieux d’utiliser le laser vert, plutôt que le laser infrarouge, pour détecter le fond de l’eau. En vous appuyant sur un schéma expliquant le principe de cette mesure, estimer la valeur de la profondeur de l’eau à l’endroit où la mesure du document n°2 a été effectuée.
Le LiDAR à effet Doppler
Il permet de faire des mesures de la vitesse de vents ou de nuages grâce à l’effet Doppler. Pour présenter ce principe, un professeur propose le dispositif expérimental photographié ci-après dans lequel le LiDAR est remplacé par un ensemble « émetteur - récepteur » d’ultrasons et le nuage est modélisé par une plaque fixée sur un chariot mobile. On suppose que la température de la salle est de 25°C. 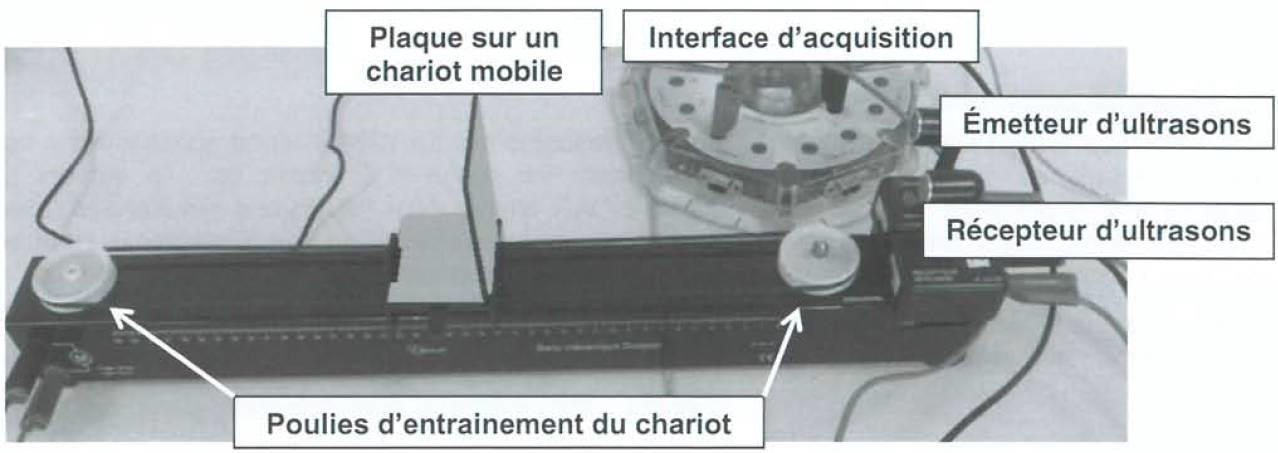
Expérience n°1
Pour déterminer la valeur v de la vitesse de déplacement du chariot, Anna, à l’aide d’un chronomètre, mesure la durée mise par le chariot pour se déplacer d’une distance d = 30,0 ± 0,5 cm. Elle réalise plusieurs chronométrages dont les résultats sont regroupés dans le tableau suivant :
| Mesure n° | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Durée τ (en s) | 2,08 | 2,05 | 2,06 | 2,13 | 2,08 | 2,07 | 2,09 | 2,05 | 2,08 | 2,09 |
- L’écart-type sur la durée est sn-1 = 2,35 × 10–2 s ;
- L’incertitude sur la durée se calcule avec la formule suivante : [ U ( tau ) = \frac {2,26 times sigma _ { n - 1 } } { \sqrt {n} } ] où n est le nombre de mesures réalisées.
- L’incertitude relative sur la valeur de la vitesse est [ \frac { U (v) } { v } = \sqrt { ( \frac { U ( tau ) } { tau } ) ^ { 2 } + ( \frac {U ( d ) } { d } ) } ^ { 2 } ]
Expérience n°2 
Exercice 2 : Système d’aide à la navigation aérienne
Le VOR Doppler (VOR abréviation de VHF Omnidirectional Range) est un système d’aide à la navigation aérienne qui permet au pilote d’un avion de déterminer sa position et son déplacement par rapport à une station au sol. Répertoriés sur les cartes aéronautiques, les différents VOR constituent des repères sur lesquels le pilote peut s’appuyer pour établir "une route". On se propose, dans cet exercice, d’étudier le fonctionnement d’un dispositif VOR utilisant l’effet Doppler. Document 1 : Principe de repérage d’un avion L’avion est repéré par l’angle θ entre le Nord magnétique et la demi-droite OA liant la station VOR à l’avion. La demi-droite OA, appelée radial, est nommée par l'angle θ qu'elle forme avec la direction du Nord magnétique. Un radial est ainsi caractérisé par trois chiffres : sur le schéma ci-contre est représenté le radial 080. 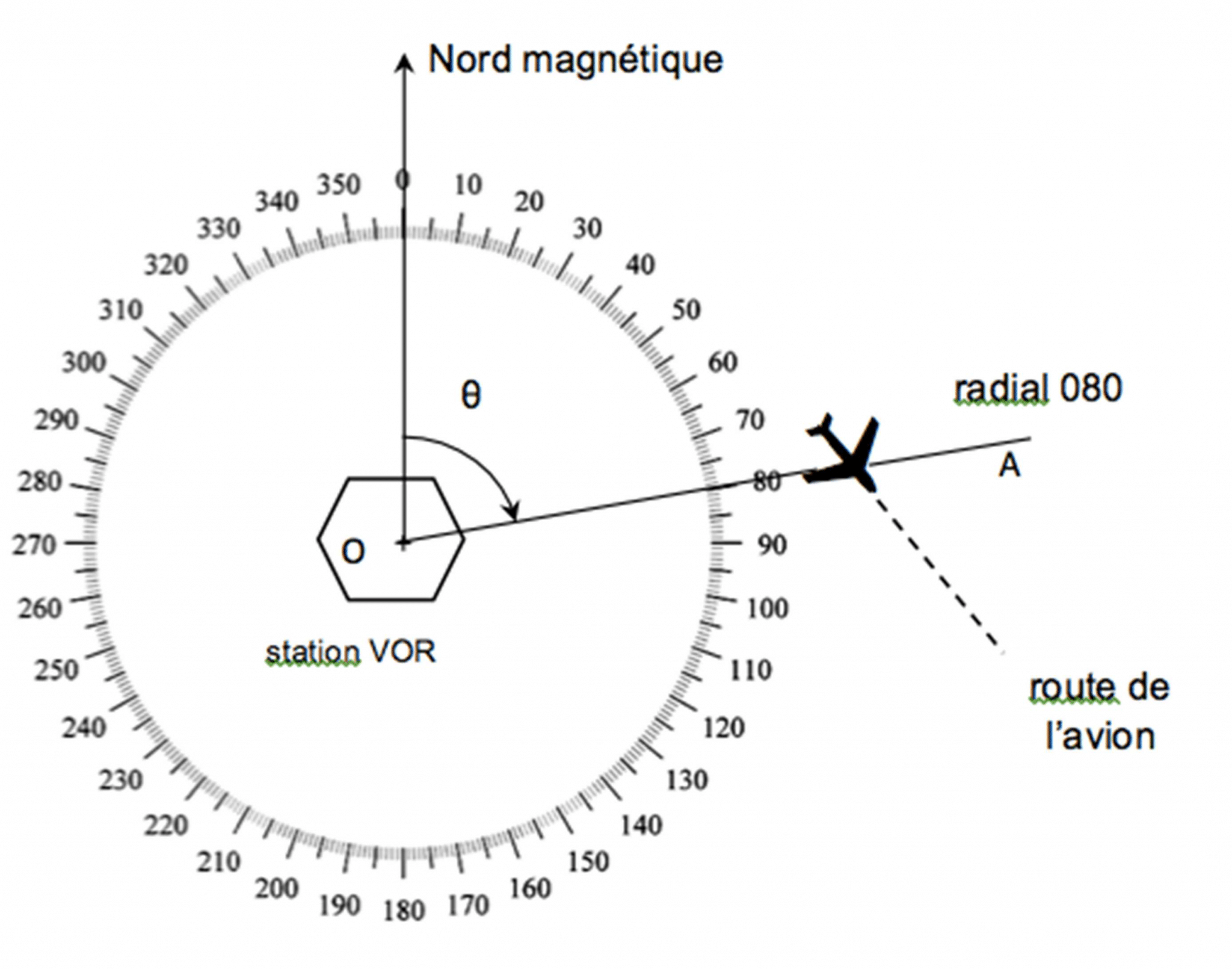
Document 1 : Principe de repérage d’un avion
L’avion est repéré par l’angle θ entre le Nord magnétique et la demi-droite OA liant la station VOR à l’avion.
La demi-droite OA, appelée radial, est nommée par l'angle θ qu'elle forme avec la direction du Nord magnétique.
Un radial est ainsi caractérisé par trois chiffres : sur le schéma ci-contre est représenté le radial 080.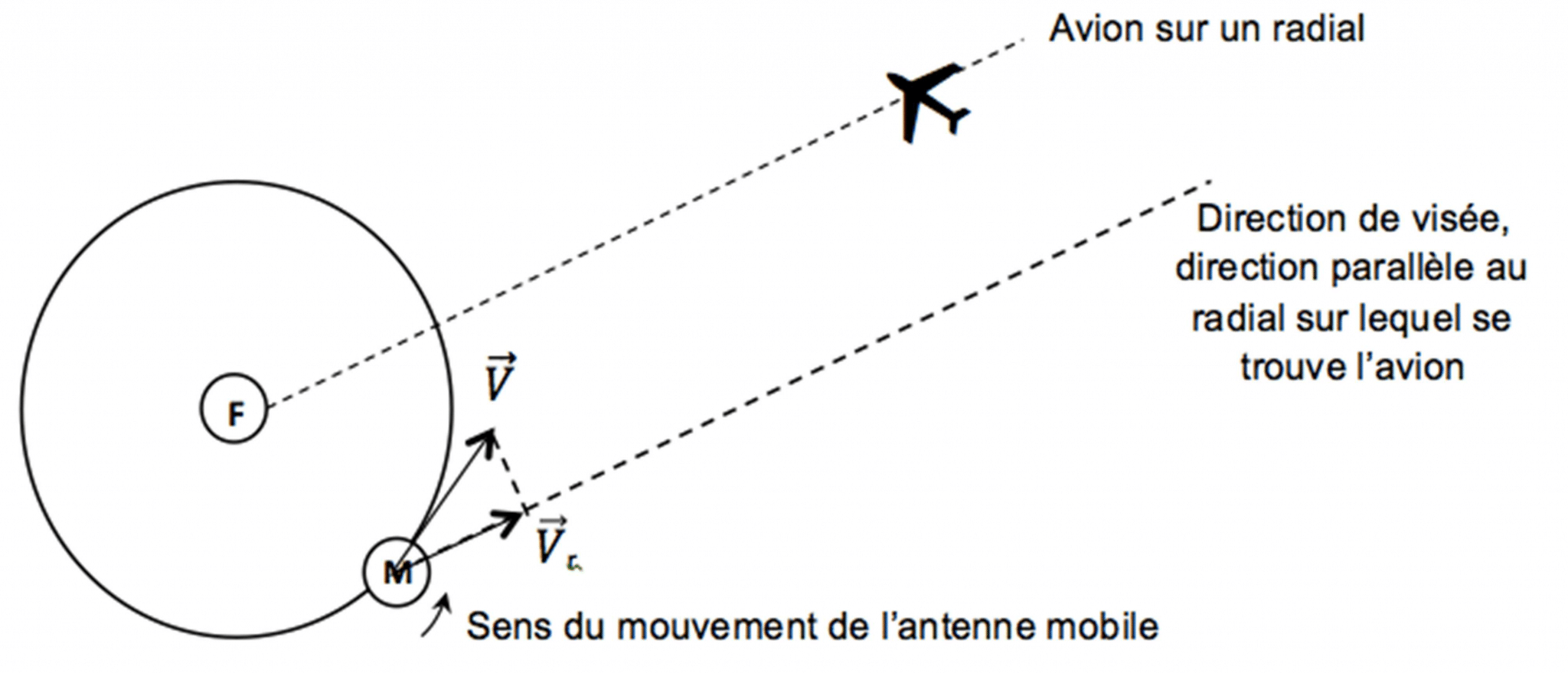
- une antenne centrale fixe F qui émet dans toutes les directions un signal de référence constitué d’une onde porteuse de fréquence f0= 113MHz, modulée en amplitude par un signal sinusoïdal de fréquence 30 Hz ;
- une antenne mobile M décrivant autour de l’antenne fixe F, un cercle de rayon 6,76 m à raison de 30 tours.s-1 et émettant une onde de fréquence fsource.
Les signaux à transmettre usuellement, comme par exemple les sons (voix des pilotes, des contrôleurs aériens), sont constitués d’ondes de basses fréquences. Leur faible distance de propagation, la superposition d’un grand nombre de ces signaux dans l’environnement et le fait que les dimensions des antennes réceptrices doivent être de l’ordre de grandeur de la longueur d’onde des signaux à capter, constituent autant d’obstacles à leur utilisation directe. La modulation est alors une solution pour transmettre les signaux : on fait varier l’une des caractéristiques (amplitude, fréquence…) d’un signal de fréquence beaucoup plus élevée (porteuse), avec l’information à transmettre (signal modulant). On obtient un signal modulé. 
1.Étude du signal émis par l’antenne fixe F
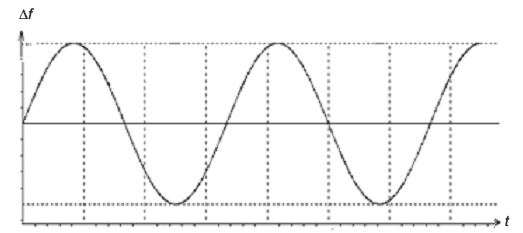
1.1. Représenter les éléments de la chaine de transmission d’information entre le VOR Doppler et l’avion. On identifiera en particulier l’émetteur, le canal de transmission et le récepteur. 1.2. S’agit-il d’une transmission guidée ou libre ? Justifier. 1.3. Le signal modulé émis par l’antenne F est représenté ci-dessous. 1.3.2. Montrer que le signal modulant a une fréquence égale à 30 Hz. 1.4. Quel devrait être l’ordre de grandeur de la taille d’une antenne destinée à capter une onde électromagnétique de fréquence 30 Hz ? De fréquence 113 MHz ? Conclure. 2.Analyse du signal émis par l’antenne mobile M et perçu par l’avion On se place dans la situation représentée sur la figure du document-réponse en annexe à rendre avec la copie. 2.1. Sur quel radial se trouve l’avion de cette figure ? 2.2. Sur ce document-réponse, représenter, sans souci d’échelle, les vecteurs vitesse de l’antenne M lors de son passage successivement aux points N, W, S, E. 2.3. Le signe de ∆f, décalage en fréquence entre le signal perçu par l’avion et le signal émis par l’antenne M, dépend de la position de l’avion et de l’antenne. Pour les quatre points N, W, S, E, dire si ∆f est nul, positif ou négatif. 2.4. Décrire qualitativement la variation du décalage ∆f en signe et en amplitude au cours d’une rotation complète de l’antenne M. Justifier en quelques lignes que le décalage ∆f évolue de façon périodique, à une fréquence de 30 Hz indépendante de la vitesse de l’avion. 2.5. Compléter la figure du document-réponse donnant l’évolution de ∆f en fonction du temps, en plaçant les points correspondant aux positions N, S, E, W de l’antenne mobile M. 3.Application à la détermination du radial sur lequel est positionné l’avion. Le récepteur de l’avion reçoit les signaux émis par les deux antennes F et M. 3.1. Le traitement de ces signaux reçus permet d’extraire les deux signaux suivants :
- signal 1 : Δf en fonction du temps ;
- signal 2 : signal de référence de fréquence 30 Hz de l’antenne fixe F.
La comparaison entre les signaux 1 et 2 permet de déterminer le radial sur lequel se trouve l’avion. Ces signaux sont dits en phase si, comme sur la figure ci-dessous, Δf et l’amplitude du signal de référence passent par leurs valeurs maximale ou minimale simultanément. Le VOR Doppler est étalonné afin qu’un avion sur le radial 360, reçoive les signaux 1 et 2 en phase. On suppose que l’antenne mobile M, initialement au point N (figure de l’annexe), se déplace jusqu’en W. À l’aide d’un raisonnement s’appuyant sur ce mouvement, montrer que pour deux avions, l’un au radial 360 l’autre au 090, l’évolution des valeurs de Δf est nécessairement différente. On pourra accompagner l’exposé d’un schéma. 3.3. Dans la réalité, l’antenne M n’est pas réellement une antenne physiquement mobile. C’est en fait un système électronique qui simule ce mouvement. Calculer la vitesse qu’aurait l’antenne M dans le référentiel terrestre si elle était mécaniquement mobile. Commenter. 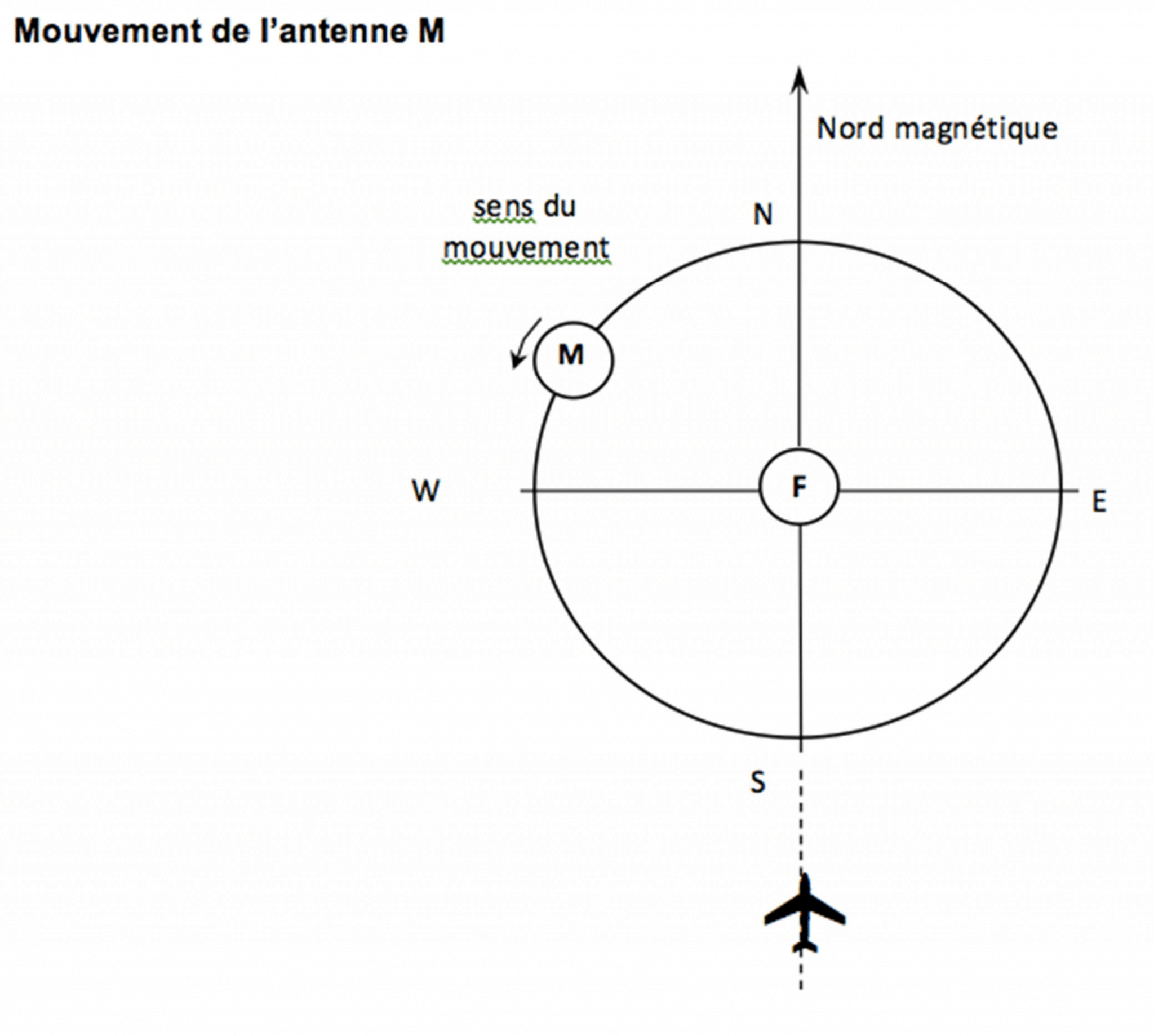
Résumer avec l'IA :
Vous avez aimé cet article ? Notez-le !










Si vous désirez une aide personnalisée, contactez dès maintenant l’un de nos professeurs !