
Les lois de Newton décrivent comment les forces influencent le mouvement des objets. Elles se composent de trois principes : le principe d'inertie, la relation entre force et accélération, et le principe d'action-réaction.
Formulées par le physicien anglais Isaac Newton en 1687 dans son œuvre magistrale Principes mathématiques de la philosophie naturelle, ces règles ont provoqué un bouleversement scientifique sans précédent. Avant lui, la pensée dominante reposait sur les idées d'Aristote, qui affirmait qu'un objet avait besoin d'une force continue pour rester en mouvement. Newton, s'appuyant sur les travaux de Galilée, a prouvé le contraire. Il a démontré que le mouvement est un état naturel et que seules les forces extérieures viennent le perturber. C'est la naissance de la mécanique classique.

Aujourd'hui, les trois lois de Newton restent le socle indispensable de la physique moderne. Elles sont fondamentales pour comprendre le mouvement d'un véhicule sur une route, le fonctionnement des articulations humaines, la mise en orbite des satellites ou encore l'attraction des planètes. Bien que la mécanique quantique et la relativité d'Einstein aient depuis complété notre compréhension de l'infiniment petit et de l'infiniment grand, le domaine de la mécanique newtonienne reste parfaitement valide pour décrire les objets de notre quotidien se déplaçant à des vitesses très inférieures à celle de la lumière.
Pour aborder cette leçon avec clarté, voici un tableau comparatif résumant les concepts que nous allons détailler.
| Loi physique | Nom usuel | Concept central | Formule ou principe |
|---|---|---|---|
| Première loi | Principe d'inertie | Maintien de l'état de mouvement en l'absence de force perturbatrice. | ΣF = 0 |
| Deuxième loi | Principe fondamental de la dynamique | Modification du mouvement proportionnellement à la force et à la masse. | ΣF = m × a |
| Troisième loi | Principe des actions réciproques | Toute action exercée génère une réaction de même intensité et opposée. | F A/B = − F B/A |
Les travaux d'Isaac Newton ont permis de lier mathématiquement les forces et le mouvement.










La première loi de Newton : le principe d’inertie
Énoncé de la première loi de Newton
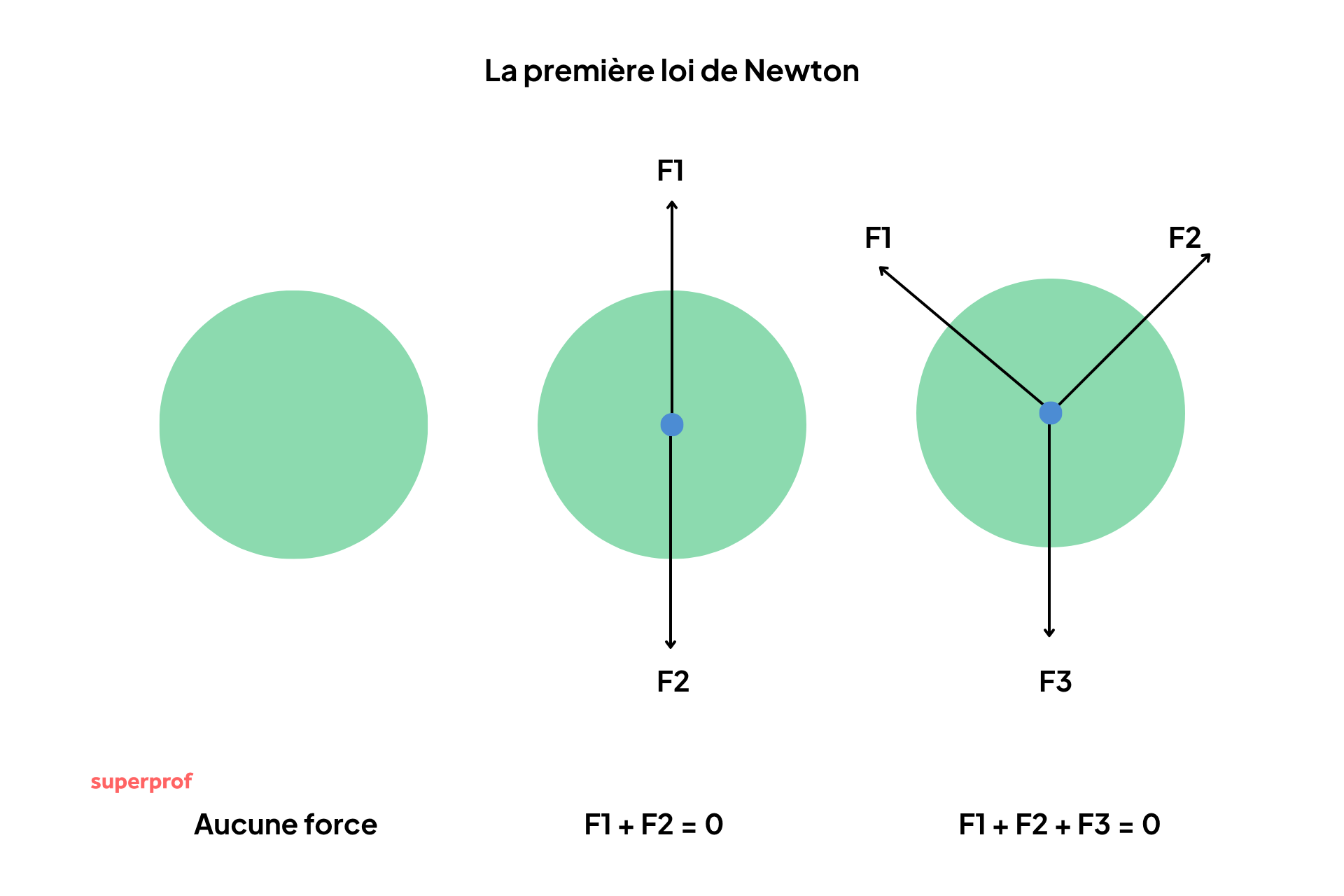
L'énoncé classique stipule que tout corps conserve son état de repos ou de mouvement rectiligne uniforme si les forces qui s’exercent sur lui se compensent ou si aucune force extérieure n’agit sur lui.
En d'autres termes, cette première loi de Newton nous enseigne qu'un objet est "paresseux" par nature. Il ne modifie jamais son comportement de lui-même. Si un objet est immobile, il restera immobile pour l'éternité, à moins qu'on ne le pousse ou qu'on ne le tire. S'il est déjà en mouvement, il continuera d'avancer en ligne droite et à la même vitesse de façon perpétuelle.
Sur Terre, nous avons l'impression qu'un objet glissant sur le sol finit toujours par s'arrêter de lui-même. C'est une illusion causée par des forces invisibles : les frottements de l'air et du sol. Dans le vide spatial, là où ces frottements n'existent pas, le principe d'inertie prend tout son sens.
Les conditions d'application : systèmes et référentiels
Pour que ce principe fonctionne, il faut définir le cadre de l'étude. En physique, on sépare l'univers en deux : le système (l'objet que l'on étudie) et le milieu extérieur (tout le reste). Le principe d'inertie s'applique à deux types de systèmes :
Le système isolé : c'est un système qui ne subit absolument aucune force extérieure. Dans la réalité, c'est un modèle théorique pur, car la gravité agit partout dans l'univers.
Le système pseudo-isolé : c'est un système qui subit des forces, mais dont la somme totale s'annule parfaitement. Un livre posé sur une table subit son propre poids vers le bas, et la réaction de la table vers le haut. Les deux forces se compensent, le livre est pseudo-isolé et reste donc immobile.
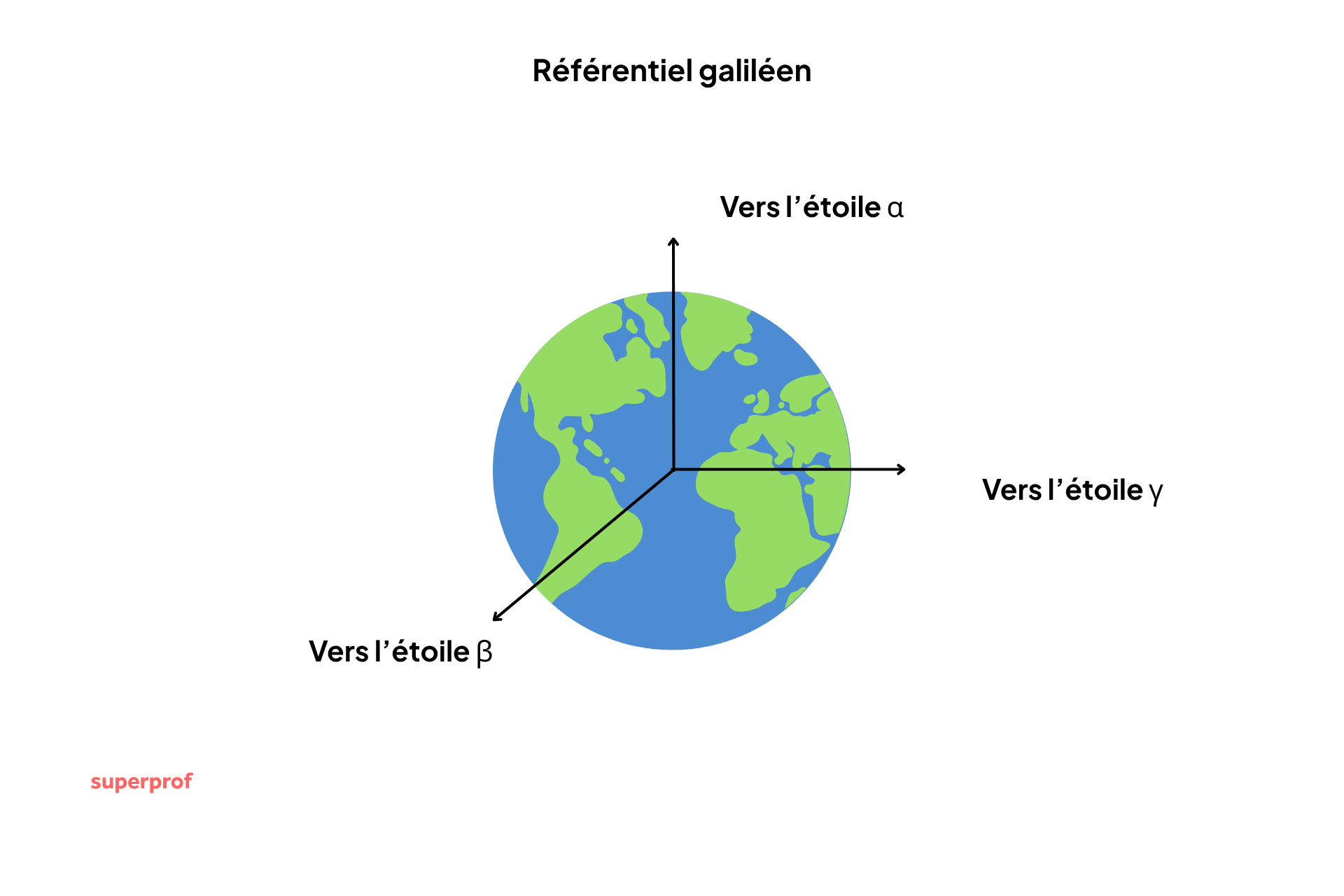
De plus, comprendre le lien entre les référentiels et les lois de Newton est indispensable, car cette première loi n'est valable que dans un référentiel galiléen. Un référentiel est un point de vue par rapport auquel on observe le mouvement. Un référentiel est dit "galiléen" si le principe d'inertie s'y vérifie. En pratique, pour des expériences courtes, on considère la surface de la Terre comme un référentiel galiléen.
Formulation mathématique du principe d’inertie
Si la somme vectorielle des forces extérieures est nulle, l'accélération est nulle, donc le vecteur vitesse reste constant.
ΣF = 0 ⇒ vecteur vitesse = constante.
Si cette constante est égale à zéro, l'objet est au repos. Si elle est différente de zéro, l'objet est en mouvement rectiligne uniforme.

Exemples concrets du principe d'inertie
Le freinage brutal : un passager debout dans un bus est projeté vers l’avant quand le véhicule freine. Son corps, par inertie, tente de conserver sa vitesse initiale de déplacement alors que le bus ralentit.
Le patineur sur glace : sur une patinoire parfaitement lisse (frottements quasi nuls), un patineur qui a pris de l'élan continuera de glisser en ligne droite sans avoir besoin de faire le moindre effort musculaire.
La nappe tirée : le fameux tour de magie consistant à retirer d'un coup sec une nappe sous des assiettes repose sur cette loi. Si le mouvement est assez rapide, la force de frottement est trop faible pour mettre la vaisselle en mouvement, et elle reste à sa place.
La 2eme loi de Newton : le principe fondamental de la dynamique
Énoncé de la deuxième loi de Newton
La deuxième loi de Newton explique ce qu'il se passe lorsque les forces ne s'annulent pas. Elle relie la somme des forces exercées sur un objet, sa masse et son accélération. Elle établit que l'accélération subie par un corps est directement proportionnelle à la force nette qui lui est appliquée, et inversement proportionnelle à sa masse.
C'est la clé de voûte de la mécanique. Elle explique que pour modifier la vitesse ou la trajectoire d'un objet (donc créer une accélération), il faut appliquer une force. Plus cette force est intense, plus l'objet accélère rapidement. En revanche, la masse joue un rôle de résistance. Plus l'objet est massif, plus son inertie est grande, et plus il faudra déployer d'efforts pour le faire bouger.
Formulation de la deuxième loi de Newton et notion de vecteur
Si vous cherchez les formules des 3 lois de Newton, le principe fondamental de la dynamique est l'équation mathématique la plus incontournable de ce cours.
ΣF = m × a

Détaillons les composantes de cette formule :
ΣF correspond à la somme vectorielle des forces extérieures. L'unité de la force est le newton (N). Un newton correspond à la force nécessaire pour donner à une masse de 1 kg une accélération de 1 m/s².
m représente la masse de l'objet, qui s'exprime en kilogrammes (kg). La masse est une grandeur scalaire invariable, peu importe où vous vous trouvez dans l'univers.
a désigne le vecteur accélération, mesuré en mètres par seconde carrée (m/s²). L'accélération et la somme des forces partagent toujours la même direction et le même sens.
Newton avait originellement formulé sa loi non pas avec l'accélération, mais avec la "quantité de mouvement" (le produit de la masse par la vitesse). Il affirmait que la force est égale à la dérivée de la quantité de mouvement par rapport au temps. La formule ΣF = m × a est une simplification très utile qui ne s'applique que si la masse du système reste constante au cours du temps (ce qui n'est pas le cas d'une fusée qui brûle son carburant, par exemple).
Exemples d'application de la dynamique
La poussée d'une voiture : si votre voiture tombe en panne et que vous essayez de la pousser, son immense masse nécessite une force musculaire énorme pour générer une toute petite accélération. Si vous poussiez un vélo (masse faible) avec la même force, il accélérerait fulguramment.
La chute libre : lorsqu'on lâche une pomme, la seule force qui agit sur elle est son poids (l'attraction gravitationnelle). Selon la loi, Poids = masse × accélération gravitationnelle terrestre. La pomme accélère donc vers le sol.
Le tir au football : la force d'impact du pied du joueur sur le ballon modifie brutalement son état de repos. La masse du ballon étant petite, la grande force du coup génère une accélération phénoménale vers le but adverse.
La troisième loi de Newton : le principe des actions réciproques
Énoncé de la troisième loi de Newton
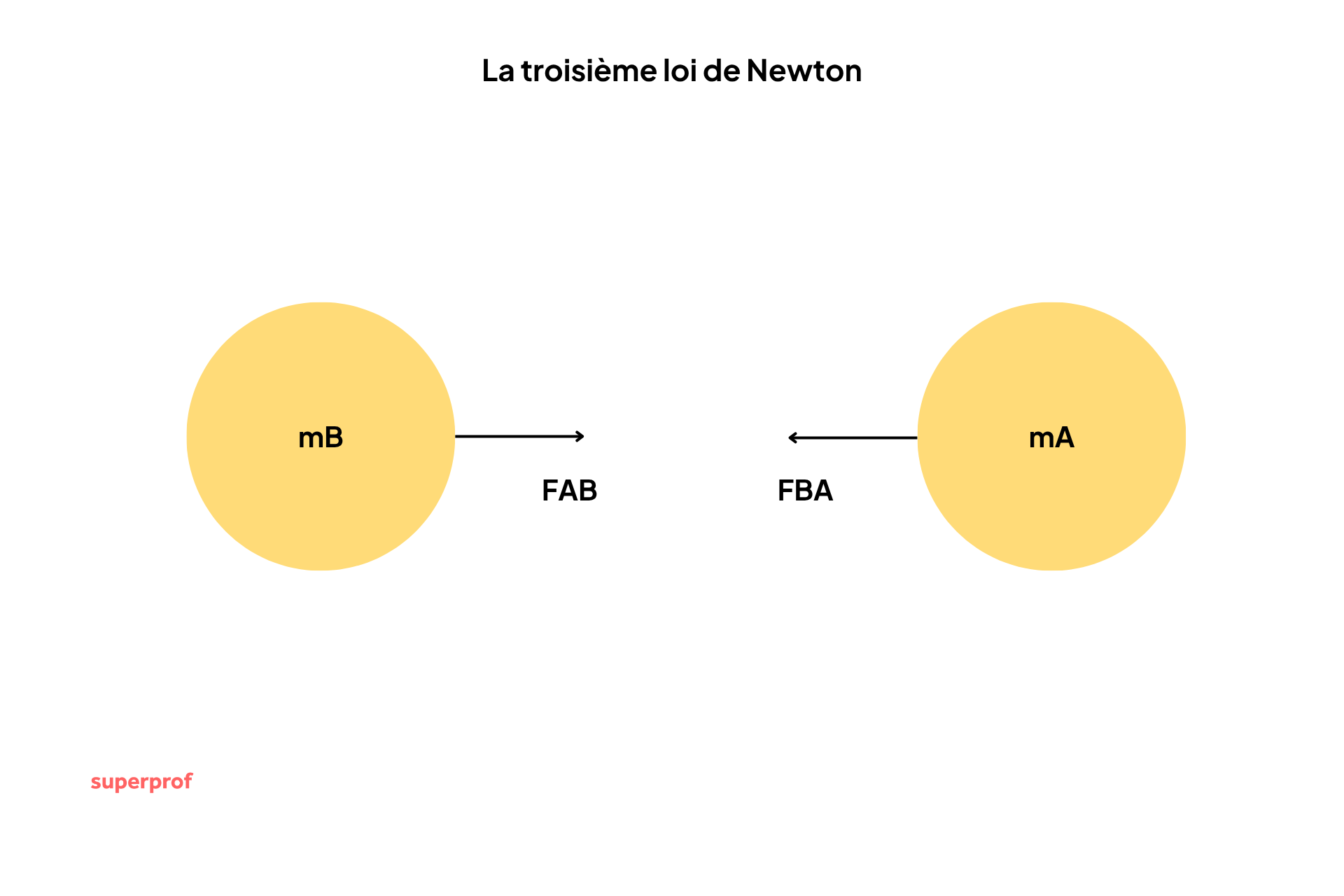
La troisième loi de Newton change de point de vue pour s'intéresser aux interactions. Elle affirme que si un objet A exerce une force sur un objet B, alors l’objet B exerce obligatoirement une force de même intensité et de sens opposé sur l’objet A.
On l'appelle très souvent le principe d'action-réaction. C'est une loi de la nature absolument inviolable : les forces n'existent jamais de manière isolée, elles fonctionnent toujours par paires. Vous ne pouvez pas toucher quelque chose sans que cette chose ne vous touche en retour avec une force identique.
Il y a cependant un piège dans lequel tombent beaucoup d'étudiants. On pourrait se dire que si deux forces sont égales et opposées, elles s'annulent, empêchant tout mouvement. C'est faux. Ces deux forces ne s'annuleront jamais car elles ne s'appliquent pas sur le même objet. L'action s'applique sur le système B, et la réaction s'applique sur le système A. Chacun réagira donc différemment selon sa propre masse.
Formulation de la troisième loi de Newton
La modélisation mathématique de cette loi utilise des vecteurs pour bien montrer l'opposition de direction.
F A/B = − F B/A
Dans le détail, les deux forces composant ce duo action-réaction partagent plusieurs caractéristiques strictes :
- Elles ont la même ligne d'action, c'est-à-dire la même direction dans l'espace.
- Elles possèdent exactement la même intensité, exprimée en newtons.
- Elles ont des sens rigoureusement opposés.
- Leurs points d'application sont différents.
Exemples d'illustrations de la loi d'action-réaction
La marche à pied : pour avancer, nous ne poussons pas l'air devant nous. En réalité, notre pied exerce une force vers l'arrière sur le sol. Par réaction, le sol exerce une force identique vers l'avant sur notre pied. C'est le sol qui nous propulse.
La propulsion dans le vide spatial : comment une fusée peut-elle avancer dans l'espace alors qu'il n'y a pas d'air sur lequel s'appuyer ? C'est grâce à cette loi. Le moteur de la fusée éjecte des gaz à très haute vitesse vers l'arrière. En réaction, les gaz exercent une force identique vers l'avant sur la fusée, ce qui la fait accélérer.
Le tir au pistolet : lorsqu'une arme à feu expulse une balle avec une énorme force vers l'avant, la réaction de cette force se traduit par le "recul" de l'arme qui vient frapper la main ou l'épaule du tireur vers l'arrière.
Exercices pratiques et cas de réflexion
Exercice 1 : le mystère de l'ascenseur
Vous vous pesez sur une balance posée sur le sol d'un ascenseur. L'ascenseur se met brusquement à monter avec une forte accélération. Que se passe-t-il sur l'écran de la balance ?
Veuillez sélectionner une réponse.
La réponse est la numéro 2. Lors de l'accélération vers le haut, par la première loi (inertie), votre corps tend à rester immobile. La deuxième loi montre que pour que votre masse suive l'accélération de l'ascenseur, le plancher (et donc la balance) doit exercer une force de réaction vers le haut supérieure à votre poids habituel. La balance mesurant cette force de réaction, l'affichage augmente temporairement.
Exercice 2 : collision asymétrique
Un camion lourd roulant à vive allure percute frontalement un petit insecte volant en sens inverse. Laquelle des deux entités subit la force d'impact la plus grande ?
Veuillez sélectionner une réponse.
Les deux subissent exactement la même force ! C'est la troisième loi de Newton. La force du camion sur l'insecte est égale et opposée à la force de l'insecte sur le camion. La différence de dégâts s'explique par la deuxième loi : avec la même force appliquée, l'insecte (masse minuscule) subit une accélération mortelle, tandis que le camion (masse colossale) ne subit qu'une décélération totalement imperceptible.

Exercice 3 : calcul simple de traction
Une dépanneuse remorque une voiture de 1200 kg en panne sur une route horizontale. On néglige les frottements. La dépanneuse démarre et applique une force constante de 3600 N sur le câble de remorquage. Quelle est l'accélération subie par la voiture en panne ?
Ce champ est requis.
On applique la deuxième loi, ΣF = m × a. La seule force horizontale est la traction du câble (3600 N). L'équation devient 3600 = 1200 × a. On isole l'accélération : a = 3600 / 1200 = 3 m/s². La voiture subit une accélération de 3 mètres par seconde carrée.
🛑 La première loi (Inertie) : Sans intervention d'une force extérieure, un objet reste immobile ou continue d'avancer en ligne droite à vitesse constante.
🚀 La deuxième loi (Dynamique) : La force est le moteur du changement de vitesse. L'équation absolue à connaître est ΣF = m × a. L'accélération est d'autant plus grande que la masse est faible.
🔄 La troisième loi (Action-réaction) : Les forces existent toujours par paires égales et de sens opposés. Une action engendre une réaction simultanée sur deux objets distincts.
La physique est une discipline fascinante mais parfois difficile à appréhender mathématiquement. Si vous rencontrez des blocages sur les bilans de forces ou les vecteurs, n'hésitez pas à prendre des cours de physique-chimie sur Superprof pour bénéficier d'un accompagnement personnalisé !
Sources
- Newton, Isaac. Principes mathématiques de la philosophie naturelle. 1687. Traduction de la marquise du Châtelet, 1759.
- Hecht, Eugene. Physique. De Boeck Supérieur, 3ème édition, 2006. (Ouvrage universitaire de référence en dynamique).
- Éduscol. "Programmes de physique-chimie du lycée général et technologique". Ministère de l'Éducation nationale.
Résumer avec l'IA :
Vous avez aimé cet article ? Notez-le !












Si vous désirez une aide personnalisée, contactez dès maintenant l’un de nos professeurs !
Il y a une erreur sur la deuxième loi de Newton, la force est directement proportionnelle à la masse et l’accélération, et non inversement prop.
Bonjour, merci pour votre commentaire qui nous a permis de corriger cette erreur. Belle journée à vous :)
Merci, sans doute vous êtes très aidants je été impressionné. C’est plutôt sympa.
Il est indiqué, au tout début dans l’énoncé de la deuxième loi, qu’une force exercée sur un objet est inversement proportionnelle à sa masse. Ce qui est faux : la force est proportionnelle à sa masse tout comme à son accélération :
F=m.a
Dans énergie potentielle ou de position (dans la légende),il s’agit plutôt de h que de v.
mes remerciements pour l’article.
p=m1/2distance
Merci beaucoup pour l’information.sinon j’aimerais savoir la relation entre les trois lois de Newton dans la basse cylindrique, sphérique et cartésien
Bonjour, nous serions ravis de vous aider ! Rendez-vous sur la plateforme de Superprof, sélectionnez la rubrique « Découvrir nos Superprofs » en indiquant la physique. Vous trouverez de nombreux professeurs près de chez vous. Bonne journée ! 🙂